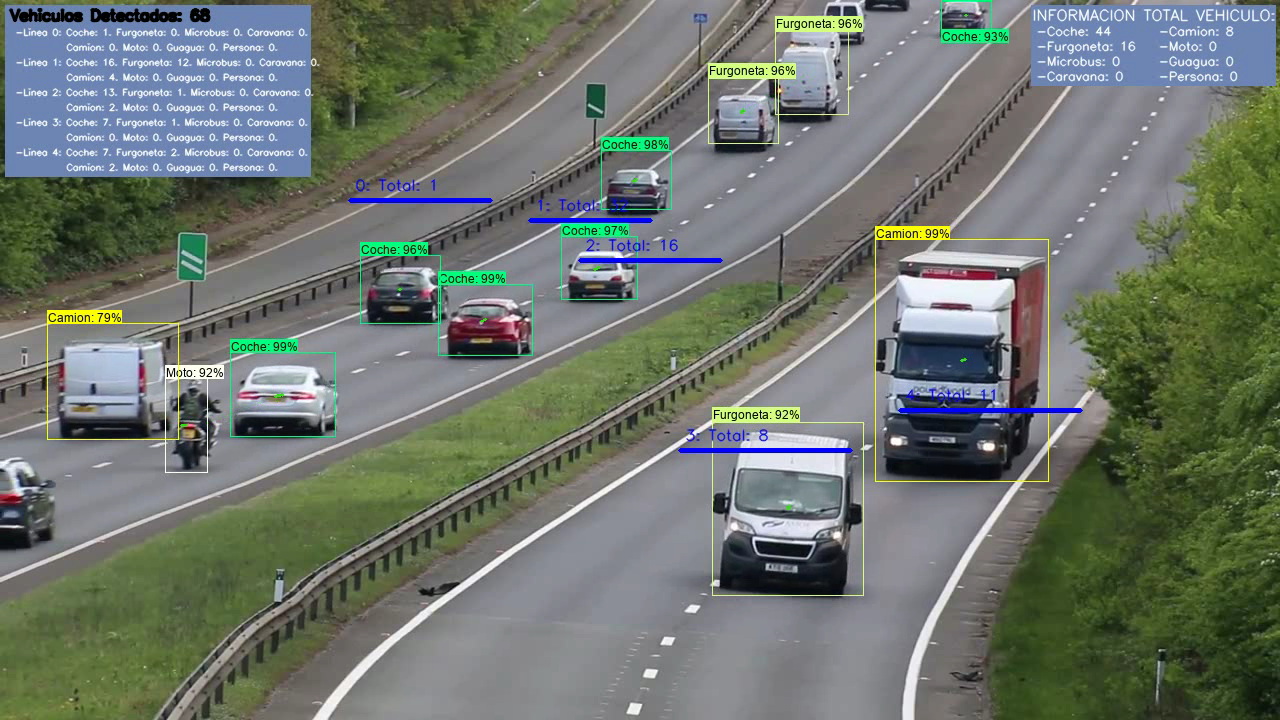
Plataforma de software para el control y el aforado segmentado de vehículos mediante el reconocimiento de imágenes con Visión por Computador e Inteligencia Artificial, de cámaras de trafico desplegadas en las redes de carreteras.
Datos
Acrónimo: VRT – Visual Route Tenerife
Referencia: n/a
Socios: Área de Movilidad del Cabildo de Tenerife e Instituto Tecnológico y de Energías Renovables.
Duración: 01/11/2019 – 31/07/2020 (9 meses)
Presupuesto: 80.000 €
Co-Financiación: Aportación específica del Cabildo de Tenerife.
Resumen del proyecto
Los avances en los últimos años en el campo de la Inteligencia Artificial y la Visión por Computador continúan reduciendo la brecha entre las capacidades visuales de las personas y las máquinas. Es por esto que en el año 2016 el Instituto Tecnológico y de Energías Renovables, ITER, S.A., decidió iniciar una línea de actuación acorde con esta disciplina.
El reconocimiento facial mediante la visión por computador orientado al control de acceso no intrusivo, la gestión de aforos y la robótica en general supusieron un punto de partida en esta materia cuando aún el estado del arte de este tipo de tecnología se encontraba en sus primeras fases. De este modo, y desde su origen, se trabajó en el desarrollo de nuevos algoritmos propios para el aprendizaje y el reconocimiento visual.
A la misma vez que se desarrollaba esta actividad se identificaron otros posibles escenarios en los que integrar los desarrollos realizados y los conocimientos adquiridos, entre ellos, el conteo y segmentación de productos en una fabricación en serie, la identificación y clasificación de imágenes, el aforado de vehículos en carreteras, etc.
Es en este último caso, como contador de aforos de carreteras, en el que se detecta una sinergia con las necesidades del Cabildo Insular de Tenerife, más concretamente con el Centro de Información de Carreteras (CIC). Éste posee más de 100 cámaras repartidas por las carreteras insulares con mayor densidad de tráfico, con lo que podría utilizarse como aforadores virtuales que permitieran tomar decisiones automatizadas en tiempo real.
Ya en el año 2019, y dado el avance significativo de las tecnologías asociadas a la Inteligencia Artificial y su disponibilidad, se decide iniciar este proyecto de nueve meses de duración durante el cual se desarrolla la plataforma VRT para el control y el aforado segmentado de vehículos mediante el reconocimiento de imágenes con Visión por Computador e Inteligencia Artificial de cámaras de tráfico desplegadas en las redes de carreteras.
En estos nueve meses se alcanzaron los objetivos propuestos:
- Generación del contenido para la identificación y el aprendizaje del sistema inteligente de reconocimiento y segmentación de vehículos.
- Entrenamiento del sistema inteligente de reconocimiento de vehículos.
- Desarrollo de la plataforma para el control segmentado de aforos en las carreteras.
Finalmente, la plataforma VRT se desplegó en un entorno virtualizado del supercomputador Teide-HPC con 32 CPU y 32 GB de memoria y sin la utilización de GPU.
Como líneas de actuación futuras se estima conveniente la adaptación de la plataforma VRT para la utilización de GPU, en lugar de CPU, una nueva capacidad que estará pronto disponible en el supercomputador Teide-HPC, que mejorará sustancialmente la detección y la segmentación de los vehículos y reducirá los tiempos de aprendizaje para la generación de los modelos.